|
UN MINIROBOT CHE TUTTI POSSONO COSTRUIRE ( 2/3 ) |
|||||||||||||||||||||||||||||||||||||||||
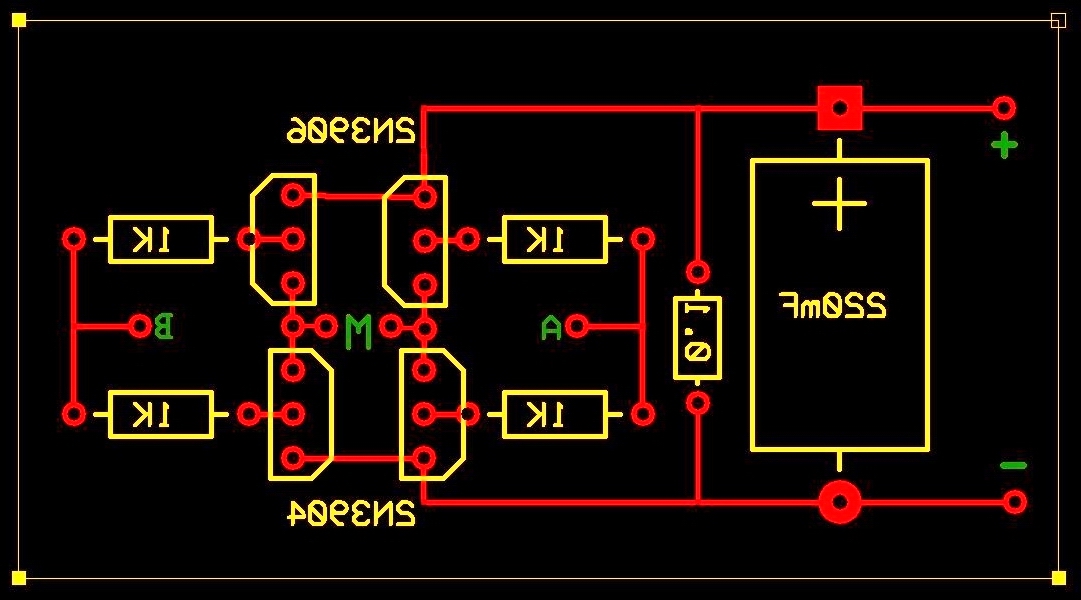
| CIRCUITO DI COMANDO DEI MOTORI (PONTE-H) | |||||||||||||||||||||||||||||||||||||||||
|
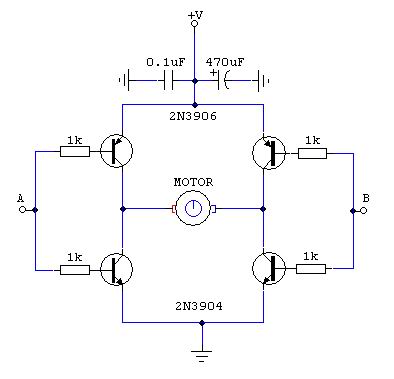
In un minirobot i motori sono pilotati da un circuito che si chiama Ponte H. Per una descrizione del Ponte H e del suo funzionamento potete fare una ricerca in questo sito o sul web oppure visitare direttamente le pagine: I progetti presentati, anche se validi, testati e funzionanti, presentano la caratteristica di utlizzare degli integrati. Per chi è alle prime armi, saldare sui piedini di un integrato può rappresentare un problema, dato che i pin sono distanziati solamente di 2,54 mm! Ecco perché ho pensato di realizzare due versioni di ponte H: uno con transistor al silicio di bassa potenza (2N3904 - 2N3906) ed uno con MOSFET di potenza (IRF520 - IRF9520N). Questa soluzione semplifica molto il lavoro di saldatura. Nelle immagini che seguono potete vedere la piedinatura e le dimensioni reali dei transistor e dei MOSFET:
Per ogni motore occorrono
4 transistor (o MOSFET), più alcune resistenze e condensatori, come
vedremo più avanti. Di ogni circuito viene fornito lo schema teorico, lo
schema di montaggio e le istruzioni per il collaudo. Cominciamo con la lista del materiale occorrente per costruire 2 ponti H:
Secondo il datasheet, i transistor impiegati sono in grado di sopportare una corrente di collettore di 200mA continui. Personalmente ho provato questo ponte con un carico di 2 motori Solarbotics SBGM3 collegati in parallelo senza nessun problema di surriscaldamento.
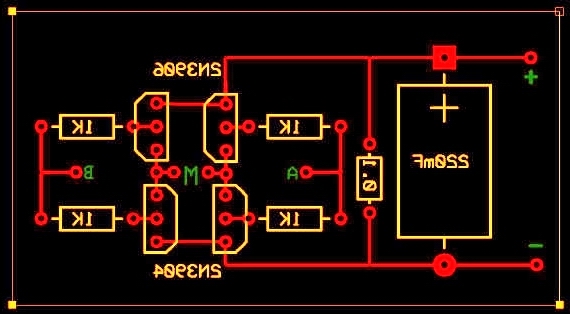
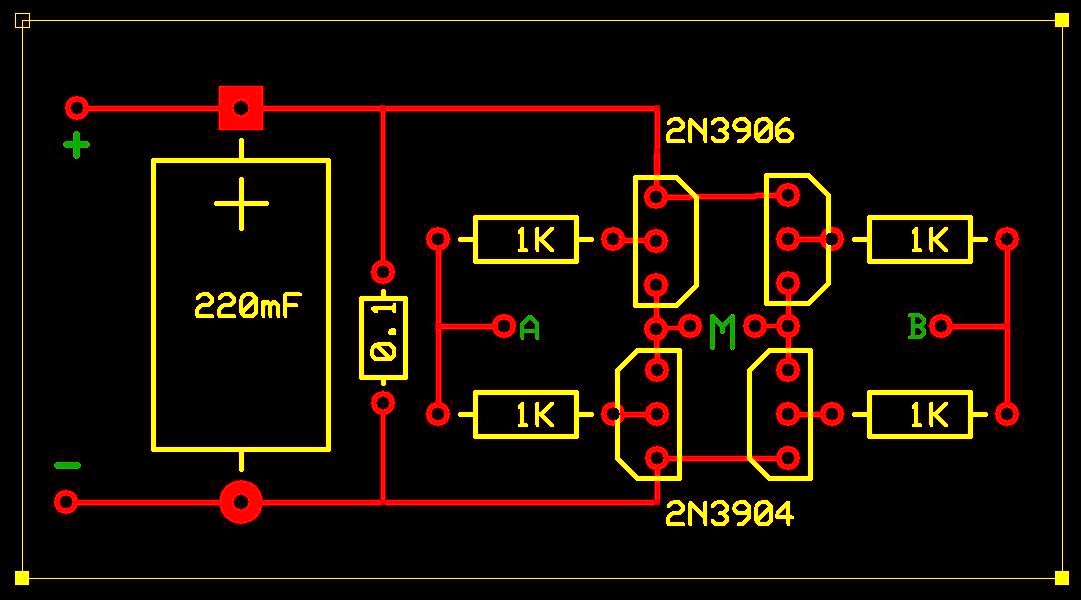
MONTAGGIO
COLLAUDO
ATTENZIONE: non alimentate il circuito lasciando i fili A e B "volanti" (cioè non collegati). NOTA: il circuito
per il secondo motore è esattamente uguale al primo, come pure le
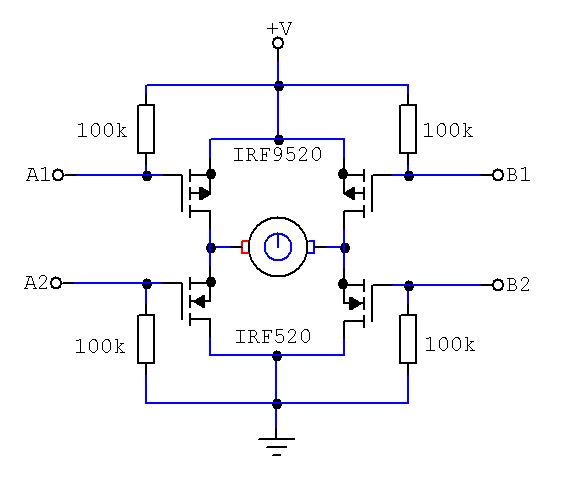
operazioni di montaggio e di collaudo. NOTA: schema teorico, non testato. Lo schema è tratto da DAVID COOK, Intermediate robot building, APRESS 2004, p. 184-185. I MosFet sono stati sostituiti con tipi più economici. Nella tabella sono riportate le caratteristiche dei MosFet dello schema originale confrontate con quelli utilizzati da me.
Per eventuali chiarimenti o informazioni inviate una email. |
|||||||||||||||||||||||||||||||||||||||||


{kind=link}
{kind=link}