|
UN MINIROBOT CHE TUTTI POSSONO COSTRUIRE ( 2 /3) |
|||||||||
| CIRCUITO DI CONTROLLO-MOTORI A RELÈ | |||||||||
|
Questo circuito è stato pensato per tutti quelli che non hanno ancora preso dimestichezza col saldatore e con lo stagno. Fare saldature sui piedini di un integrato che sono distanziati solo di 2,54 mm non è una cosa semplice, specialmente se uno è alle prime armi. A meno che non vogliate rimanere tutta la vita degli hobbisti passivi che si limitano ad assemblare schede già fatte, prima o poi dovrete imparare a saldare. Nel frattempo però potete cominciare a divertirvi costruendo un robottino e utilizzando il circuito che segue per controllare i motori:
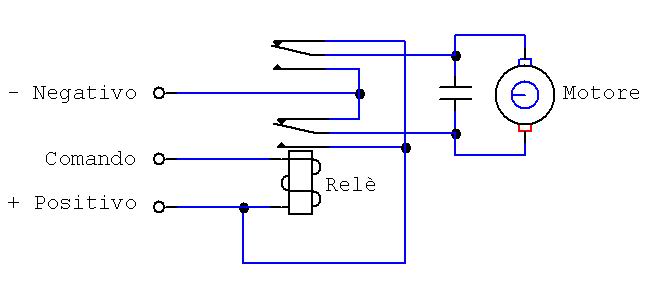
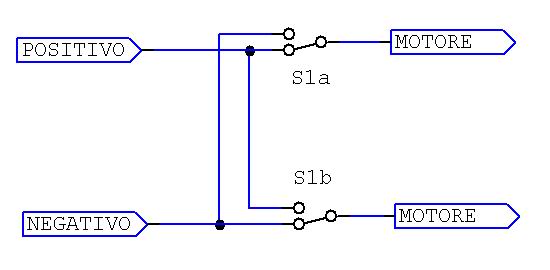
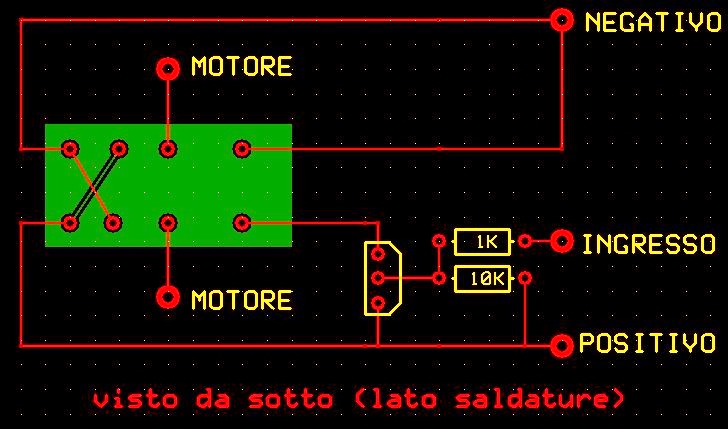
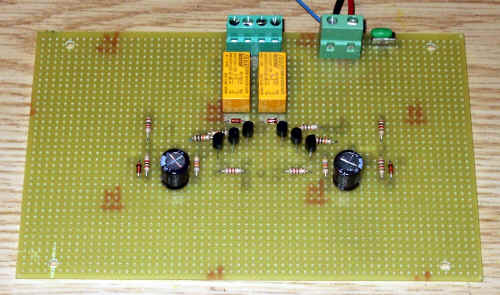
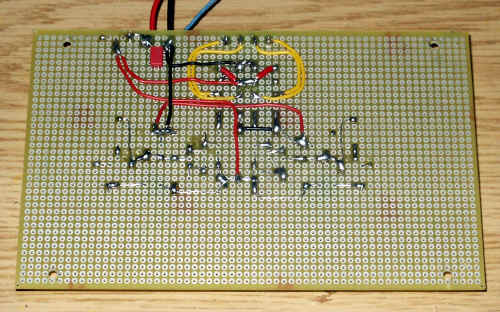
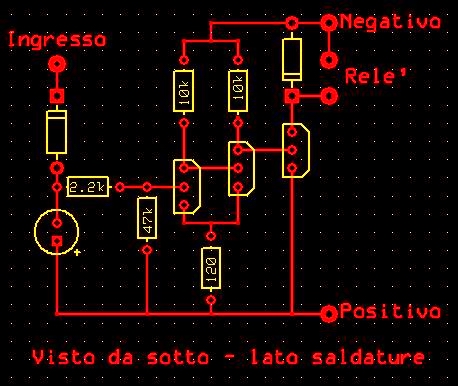
Clicca qui per vedere il layout di montaggio Come si vede nello schema, il circuito fa uso di un relè, il che semplifica notevolmente il lavoro di saldatura e di montaggio. Non appena il relè viene eccitato da un impulso di comando negativo (proveniente, per esempio, da un sensore di contatto) si scambiano le polarità sul motore e si inverte il senso di marcia, come si vede nello schema semplificato:
ATTENZIONE: la piedinatura del relè potrebbe cambiare secondo il modello. Controllate il disegno stampigliato sul corpo del relè o il datasheet (quando è reperibile). Se non riuscite, seguite la procedura seguente:
Una volta montato il circuito, provate a collegare il terminale COMANDO al negativo: il relè deve eccitarsi e il motore deve invertire la direzione di marcia. Per collegare il relè a dei sensori più sofisticati, come ad esempio dei sensori a infrarossi, possiamo usare un semplice circuito a transistor. Il circuito è "active low", cioè viene eccitato da un impulso negativo e si diseccita quando l'ingresso viene lasciato scollegato o viene collegato al positivo.
COME AGGIUNGERE IL CIRCUITO AL RELÉ Seguite attentamente le istruzioni che seguono:
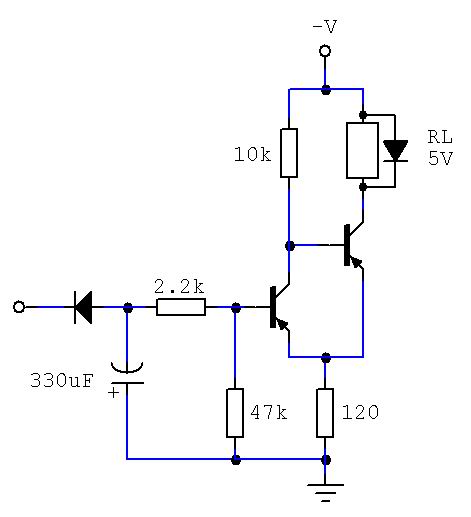
ATTENZIONE: quando si saldano i semiconduttori (transistor, diodi) bisogna fare attenzione a non surriscaldarli. Fate saldature precise, rapide e non pasticciate col saldatore. Normalmente il relè si diseccita istantaneamente, non appena viene a mancare l'impulso di comando. Se però inseriamo un breve ritardo in modo da prolungare l'eccitazione del relè anche quando cessa l'impulso, otteniamo una navigazione molto più "intelligente". Se, ad esempio, il minirobot urta contro un muro, non continua a costeggiarlo, ma cambia direzione di marcia:
Questo ritardo si ottiene con un condensatore elettrolitico che rilascia lentamente, attraverso una resistenza, la carica accumulata:
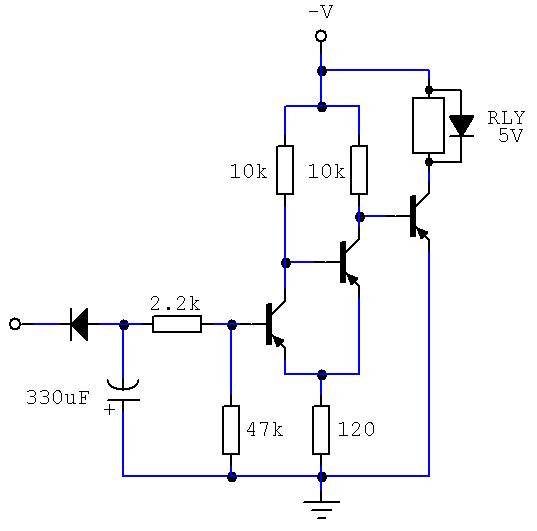
Lo schema è un classico Schmitt-trigger, cioè un circuito che funziona a scatto (relé ON - relé OFF). Il periodo di ritardo si può allungare o accorciare cambiando (entro certi limiti) il valore della resistenza da 2.2k o del condensatore elettrolitico da 330mF: valori più alti allungano il tempo e viceversa. Volendo, la resistenza da 2.2k può essere sostituita da un trimmer da 1k con in serie una resistenza fissa da 470 Ohm per regolare il tempo di ritardo secondo la necessità. Il circuito è stato provato con un'alimentazione di 6V (vedi NOTA). Il circuito appena visto funziona perfettamente, ma presenta un inconveniente: quando il sensore NON è attivo il relè è eccitato. Questo vuol dire che l'assorbimento di corrente è maggiore quando il sensore non è attivo, cioè durante la navigazione normale del robot. Con un relè da 5V - 60 Ohm, l'assorbimento di corrente supera i 55mA, per scendere a 1mA quando arriva l'impulso del sensore. Se si vuole far rimanere il relè a riposo quando il sensore è OFF, basta adottare il circuito seguente:
Clicca qui per vedere il layout di montaggio
Per altre informazioni sul pilotaggio dei motori vedi: |
|||||||||
|
Per quanto il robot funzioni perfettamente, vi segnalo alcune modifiche e miglioramenti:
|
|||||||||
|
|||||||||



{kind=link}
{kind=link}