|
Per realizzare questo
sensore di contatto ("bumper") vi occorrono i seguenti
materiali:
-
un pezzo di plastica,
di lamierino o di legno lungo come il frontale del robot
-
una squadretta a L
-
un bullone lungo 5 mm
con il suo dado
-
una rondella dentata
-
un bullone lungo 12
mm
-
diverse rondelle
semplici
-
un dado autoserrante
-
lubrificante
-
due microswitch
("fine corsa")
-
filo
-
tondino Ø 3mm
-
due capicorda
-
Cominciate a fissare
la squadretta al centro del bumper, serrandola con il bulloncino da
5mm, la rondella dentata e il dado.
-
Fate un buco al
centro della parte frontale del telaio
-
Fissate l'estremità
libera della squadretta al telaio, usando il bullone da 12 mm e il
dado autoserrante. Usate due rondelle, sia dalla parte della
squadretta, sia dalla parte del dado autoserrante.
-
Stringete il dado
autoserrante quel tanto che basta per dare stabilità al
bumper, lasciando libera la squadretta di muoversi sull'asse
del bullone.
-
Controllate che il
bumper si muova liberamente senza urtare contro il telaio.
-
Posizionate i due
switch in modo che il bumper sia mantenuto ben fermo in posizione e
fissateli).
-
Una volta asciugata
la colla, pigiate e rilasciate il bumper e controllate che gli switch
lo riportino in posizione di riposo. In caso contrario, allentate un
po' il dado autoserrante.
-
Applicate qualche
goccia di lubrificante sui giunti.
-
Saldate due fili su
ciascuno switch, sui contatti normalmente aperto (indicato con
la sigla NA o NO) e comune (C).
-
I fili di ciascuno
switch vanno saldati uno al negativo e l'altro all'ingresso
del circuito di comando dei motori (vedi schema).
Ricordatevi che il bumper sinistro va
collegato al motore destro e viceversa.
 |
Vista frontale del
bumper, realizzato con un pezzo del Meccano, fissato al telaio del
MiniRobot con una squadretta a L. |
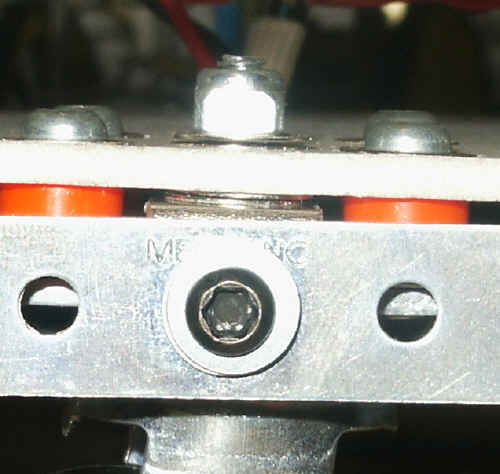 |
Particolare del
fissaggio della squadretta. Si nota in alto il dado autoserrante. |
 |
Il bumper visto da
sotto. Il fissaggio al telaio non è visibile, perché il bullone è
dietro la ruota pivottante. |
 |
Altro particolare del
bumper: la squadretta a L è libera di muoversi perché la ruota
pivottante è distanziata dal telaio. |
 |
Vista laterale da
sotto: si vede il bumper, la squadretta a L, la
ruota pivottante rialzata dal telaio con dei distanziatori di plastica. |
 |
Particolare del
fissaggio al telaio. |
 |
Vista frontale del
robot. Si vedono: la ruota pivottante, il bumper, il telaio, la
scheda con i componenti elettronici. |
 |
I due switch
"finecorsa" che hanno la funzione di mantenere il bumper
in posizione e di rilevare l'urto contro l'ostacolo. |
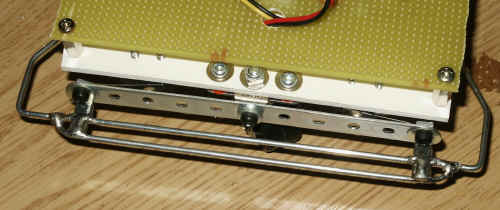 |
Per distanziare il bumper
dal telaio è stato
aggiunto un paraurti realizzato con tondino da 3mm. |
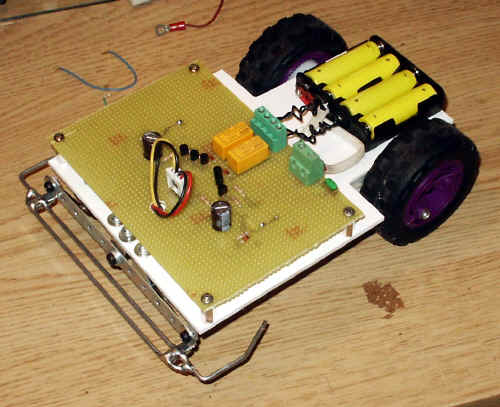 |
Il
robot finito |
| |
|
NOTA
- gli interruttori fine-corsa dei
sensori vanno collegati tra il negativo di alimentazione e
l'ingresso COMANDO del relè utilizzando il contatto COMUNE
(C) e NORMALMENTE APERTO (NO)
- con i sensori di contatto
collegati come indicato sopra (sensore sinistro al motore destro
e viceversa) il vostro MiniRobot funziona come un rover, cioè si
allontana dagli ostacoli contro cui va a sbattere.
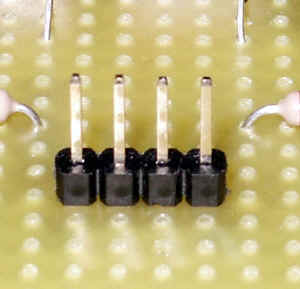 |
Per il collegamento
dei sensori alla scheda è stata utilizzata una "strip"
di contatti: i due centrali vanno collegati al negativo, i due
esterni agli ingressi del circuito di
controllo. |
 |
Un connettore
recuperato da un computer permette di collegare il bumper alla
scheda. |
|