|
COSTRUIAMO UN PONTE H con l'integrato L293D
|
|
Del ponte H abbiamo già parlato, come pure dell'integrato L293D. In questa pagina ti spiegheremo come costruire un ponte H passo dopo passo, come verificarne il montaggio e come collaudare il circuito. Intanto scarica il datsheet da internet (ricerca come: L293D datasheet). Poi procurati i componenti:
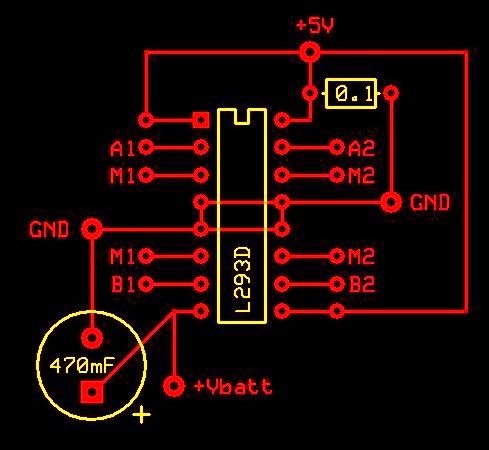
Ritaglia un pezzo di basetta millefori sufficientemente grande, ma che possa essere fissato sulla tua base. Fai quattro fori agli angoli della basetta per il fissaggio. Sistema lo zoccolo per l'integrato e "a freddo" comincia a vedere come si potrebbero sistemare i componenti. Noterai che i piedini sono molto vicini, quindi: saldatore con punta a spillo da 30W e stagno da 1mm. Lo schema di montaggio è il seguente:
MONTAGGIO
VERIFICA DEL MONTAGGIO Una volta montato il circuito, prendi il multimetro (tester) in funzione ohmetro e misura la resistenza tra i piedini dello zoccolo:
Poi controlla che a ogni filo corrisponda il piedino giusto e che non ci siano cortocircuiti tra i vari fili:
Se tutto è andato bene, salda un condensatore da 0.1mF = 100nF = 100.000pF in parallelo ai contatti di ogni motore. Salda poi i fili M1 a un motore e i fili M2 all'altro motore. COLLAUDO Inserisci l'integrato facendo attenzione alla tacca di riferimento e a non piegare i piedini. NOTA: L'alimentazione massima della logica (pin 16) è di 36V (io uso 5V per comodità). L'alimentazione massima dei motori (pin 8) è di 36V (dipende dal tipo di motori e dalla tensione d'isolamento del condensatore elettrolitico). Per comodità collegheremo provvisoriamente insieme questi due cavi (+5V e +Vbatt).
Dopo queste operazioni hai a disposizione un doppio ponte H perfettamente funzionante, pronto per essere interfacciato con i sensori del tuo robot. Prima di proseguire, dai
un'occhiata alla nota aggiuntiva che trovi qui |
|
Per altre informazioni sul pilotaggio dei motori vedi: |
|
|