|
PERCHÉ NESSUN «MICRO» IN QUESTO SITO ?
|
|||||||||||||||||||||||||||||||||||
|
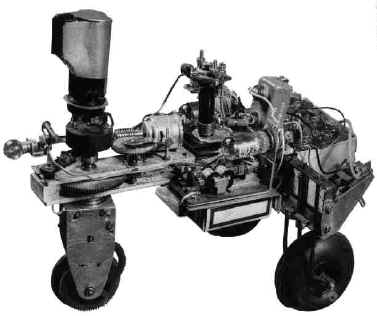
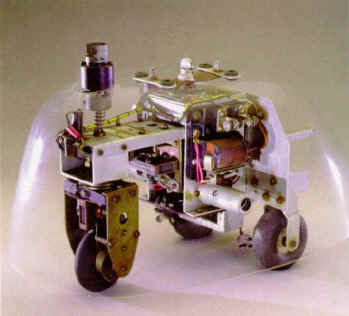
Negli anni '50, mentre
Alan Turing e John Von Neumann concepivano i processi mentali in termini
digitali, Grey Walter sottolineava l'importanza di simulare il
funzionamento del cervello usando circuiti analogici, ispirando
successive generazioni di ricercatori del calibro di Rodney Brooks, Ronald Arkin, Hans
Moravec e Mark Tilden.
Vi sono due approcci fondamentali dell'IA riguardanti il controllo dei robot: deliberativa (IA classica)
DA LEGGERE: http://www.tamie.org/PhDWork.html ARTICOLI SU RODNEY A. BROOKS: http://lgxserver.uniba.it/lei/rassegna/brooks.htm STORIA DELLA ROBOTICA:
|
|||||||||||||||||||||||||||||||||||
Per fronteggiare le sfide poste all'umanità dalla rivoluzione robotica, serve una "roboetica" (LE SCIENZE n. 434, ottobre 2004). Robot capaci di imparare adattandosi all'ambiente (Panorama n. 15, 2003). |
|||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||